มือใหม่อยากซื้อกล้อง DSLR อ่านตรงนี้เลย !!
มือใหม่อยากซื้อกล้อง DSLR อ่านตรงนี้เลยครับ TechXcite มีเทคนิคการเลือกซื้อกล้อง DSLR ให้อ่าน
สำหรับบทความนี้ TechXcite หวังเป็นอย่างยิ่งว่าจะช่วยให้มือใหม่ที่อยากเล่นกล้อง DSLR ได้อ่าน และได้ข้อคิดก่อนตัดสินใจซื้อกล้อง DSLR สักตัว สำหรับผู้ที่มองหากล้อง DSLR อยู่ คงอยากรู้ว่าจะต้องเลือกกล้องรุ่นไหน ยังไง ซื้อตัวไหนดีระหว่าง....กับ..... ซึ่งคำถามเหล่านี้จะผุดขึ้นในหัวทุกครั้งของมือใหม่ที่กำลังลังเลและมองหากล้อง DSLR ดีๆสักตัวไว้ใช้งาน
มือใหม่อยากซื้อกล้อง DSLR อ่านตรงนี้เลยครับ TechXcite มีเทคนิคการเลือกซื้อกล้อง DSLR ให้อ่าน
สำหรับบทความนี้ TechXcite หวังเป็นอย่างยิ่งว่าจะช่วยให้มือใหม่ที่อยากเล่นกล้อง DSLR ได้อ่าน และได้ข้อคิดก่อนตัดสินใจซื้อกล้อง DSLR สักตัว สำหรับผู้ที่มองหากล้อง DSLR อยู่ คงอยากรู้ว่าจะต้องเลือกกล้องรุ่นไหน ยังไง ซื้อตัวไหนดีระหว่าง....กับ..... ซึ่งคำถามเหล่านี้จะผุดขึ้นในหัวทุกครั้งของมือใหม่ที่กำลังลังเลและมองหากล้อง DSLR ดีๆสักตัวไว้ใช้งาน

นี่คือคำแนะนำในการคิดเลือกซื้อกล้อง DSLR ที่ TechXcite อยากจะแนะนำ เพราะไม่สามารถอธิบายเฉพาะเจาะจงเป็นยี่ห้อหรือรุ่นได้หมด และไม่สามารถฟันธงได้ว่ายี่ห้อไหนดีกว่ายี่ห้อไหนได้ ซึ่งหลายท่านเองมักจะมีคำถามคล้ายๆกันว่า Canon หรือ Nikon ดีกว่ากัน เป็นต้น (จริงๆแล้วยังมีอีกหลายยี่ห้อ เช่น Sony Pentax)

1. ถามตัวเองก่อนว่า พร้อมจะใช้ DSLR หรือยัง เพราะหากคุณเป็นมือใหม่จริงๆที่ไม่เคยจับกล้อง DSLR และไม่รู้อะไรเลยเกี่ยวกับเรื่องถ่ายภาพ ขอแนะนำว่าไม่ควรใช้ DSLR แม้กล้อง DSLR จะช่วยให้ได้ภาพสวยมากๆก็จริง แต่ความสวยนั้นต้องแลกมาด้วยราคาและที่สำคัญ "ไม่ง่ายอย่างที่คิด" แน่นอนว่าคุณต้องเสียเงินเพื่อแลกกับสารพัดเลนส์ที่ช่วยให้เก็บภาพได้ตามที่ต้องการ เลนส์มาโครสำหรับถ่ายแมลง ถ่ายดอกไม้ ราคาไม่ต่ำกว่าหมื่น หากอยากถ่ายวิวกว้างๆ ต้องซื้อเลนส์มุมกว้างซึ่งราคากว่า2หมื่น ยังไม่นับอุปกรณ์เสริมอื่นๆ เช่น แฟลช กระเป๋า เมมโมรี่การ์ด แถมคุณยังต้องมางงกับสารพัดเมนูที่กล้อง DSLR อาจทำให้กลายเป็นกล้องที่ถ่ายแล้วไม่สวยก็เป็นได้ ดังนั้นถามตัวเองว่าพร้อมแล้วใช่ไหมสำหรับการเล่นกล้อง DSLR หากคุณพร้อมแล้วที่จะใช้กล้อง DSLR และเป็นมือใหม่ที่พร้อมเรียนรู้ อ่านข้อต่อไปได้เลย

2. เตรียมงบประมาณ เมื่อพร้อมแล้วที่จะเอาดีและรักการถ่ายภาพจริงๆ หรือมีเงินเหลือใช้แล้วอยากได้กล้อง DSLR ไว้สะพายสักตัว ขอให้คุณเตรียมงบไว้เลยว่ามีงบเท่าไรที่จะลงทุนซื้อกล้อง DSLR สักตัว แต่ที่แน่ๆถ้าเป็นของใหม่ออกห้างแน่นอนว่าไม่ต่ำกว่า 2 หมื่น (ซึ่งมือใหม่น้อยคนนักที่จะกล้าไปซื้อมือสองมาใช้) ดังนั้นเตรียมเงินในกระเป๋าไว้เลย และที่จะแนะนำต่อไปคือ เตรียมแค่ 2 หมื่น อาจจะไม่เพียงพอสำหรับโครงการกล้องตัวแรก เพราะคุณจะต้องซื้อฟิลเตอร์ ซื้อกระเป๋ากล้องมาอีกต่างหาก (ร้านค้าส่วนใหญ่ จะแถมฟิล์มกันรอย เมมโมรี่การ์ด ชุดทำความสะอาด หรือแม้แต่ขาตั้งกล้องที่ใช้จริงไม่ได้มาให้) เจียดงบส่วนต่างไว้อีกสัก 1000 บาทขึ้นไปสำหรับอุปกรณ์เสริมเหล่านี้ด้วย สุดท้ายคือของดีย่อมมาพร้อมกับราคาที่แพงกว่า ขึ้นอยู่กับว่าซื้อมาแล้วได้ใช้เต็มประสิทธิภาพหรือเปล่า

3. เลือกรุ่นตามงบประมาณที่ได้กำหนดไว้ กำตังค์ไว้ให้ดีแล้วจัดการหาข้อมูลว่ามีกล้องรุ่นใดบ้างที่อยู่ในงบประมาณที่วางไว้ จะซื้อเลนส์หรืออุปกรณ์เสริมอื่นด้วยหรือเปล่า (แต่มือใหม่ส่วนใหญ่มักจะมองหาแค่กล้องกับเลนส์คิทสักตัวก็บอกว่าพอแล้ว) แหล่งข้อมูลในปัจจุบันมีทั้ง อินเทอร์เน็ต นิตยสาร โบรชัวร์ เพื่อนๆรอบข้างที่พอมีความรู้หรือลองไปดูที่ร้านเลยก็ได้ จากนั้นจัดการรวบรวมรุ่นที่อยู่ในงบประมาณมาลองดูว่ามีรุ่นไหนบ้าง เช่นงบซื้อเฉพาะบอดี้กล้องไม่เกิน 30,000 บาท ลองดูว่ามีรุ่นไหนที่ราคาไม่เกินงบในกระเป๋าแล้วจดออกมา

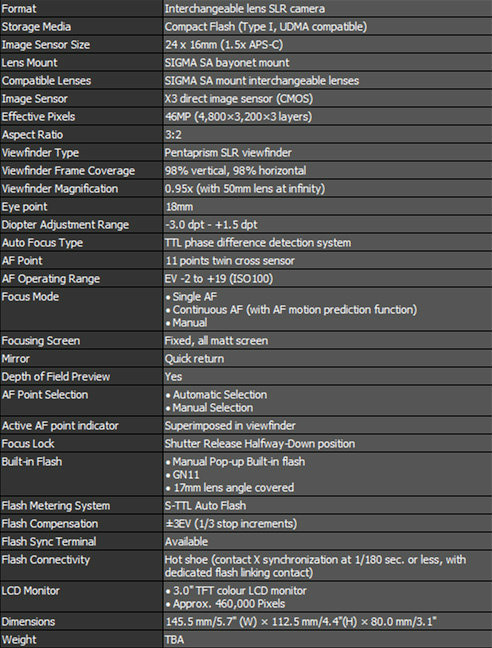
4. อ่านสเป็คให้เป็นก่อน มือใหม่หลายท่านมักจะตั้งคำถามว่ารุ่นนี้ดีกว่าอีกรุ่นอย่างไร นี่เป็นเพราะว่าคุณเลือกรุ่นได้แล้วที่อยู่ในงบประมาณ แต่ไม่รู้ว่ามันต่างกันอย่างไร ทำไมอีกตัวแพงกว่าแค่ 2 พัน อีกยี่ห้อราคาเท่ากัน แล้วแบบนี้จะเลือกอย่างไรล่ะ มันต่างกันตรงไหนบ้าง ฉะนั้นคุณต้องอ่านสเป็คให้เป็นก่อนซื้อและขอบอกเลยว่าไอ้เจ้าสเป็คนี่แหละทำเอาปวดหัวเพราะมันจะสาธยายเป็นตัวเลขและศัพท์แปลกๆที่ไม่รู้ว่าจะช่วยให่เราได้รูปสวยๆจริงหรือเปล่า การอ่านสเป็คจะเป็นสิ่งที่ช่วยตัดสินใจได้ในระดับหนึ่ง เช่น ที่ราคามันต่างกัน เพราะว่า มันมีหน้าจอบิดพับได้ ใช้แฟลชไร้สายได้ พร้อมแต่งภาพในตัวกล้องได้เลย เป็นต้น หรือบางทีอาจจะเป็นเพราะว่ากล้องตัวนั้นตกรุ่นราคามันเลยเท่ากับรุ่นเล็กที่ออกมาใหม่ ดังนั้นแนะนำได้เลยว่าหาความรู้เกี่ยวกับการอ่านสเป็คไว้ก่อนซื้อกล้องไม่เสียหาย ส่วนเรื่องค่ายกล้องนั้น ต้องบอกว่าแต่ละยี่ห้อก็มีเทคโนโลยีที่โดดเด่นของตัวเอง ฉะนั้นขึ้นอยู่กับว่าคุณชื่นชอบยี่ห้อไหนเป็นทุนเดิมอยู่หรือเปล่า ยังไม่หมดนะ ยังไม่รวมถึงการคิดเผื่ออนาคตเมื่อต้องการอัพเกรดหรือซื้ออุปกรณ์เพิ่ม รวมถึงราคาขายต่อ (เหตุผลที่คุณเห็น Nikon และ Canon เดินกันเกลื่อนเมืองก็เพราะซื้อง่ายขายคล่องนี่แหละ ยังไม่รวมถึงอุปกรณ์เสริมที่หาง่าย มีให้เลือกหลากหลายกว่ายี่ห้ออื่นๆ)
5. ไปลองจับตัวจริง แนะนำแบบนี้เพราะว่าคุณจะรู้สึกได้เลยว่าถูกชะตากับตัวไหน แถมได้รู้ด้วยว่าร้านไหนต้อนรับและมองคุณเป็นลูกค้ามากกว่าเป็นหมูให้ฟัน หรือบางร้านอาจจะไม่แยแส ถามคำตอบคำ แบบนี้อย่าหวังเรื่องบริการหลังการขายเลย การได้ลองตัวจริงคุณจะได้รู้ว่าจับถือถนัดมือหรือไม่ ปุ่มกดต่างๆใช้ง่ายหรือไม่ หรือหน้าตาตัวไหนถูกใจ เรียกว่ากล้องตัวไหนจับแล้วรู้สึกว่ามันกำลังยิ้มให้คุณ เลือกตัวนั้นแหละ เนื้อคู่กันแน่นอน เพราะก่อนหน้านี้ดูมาแล้วทั้งสเป็กทั้งราคา เหลือแค่สัมผัสตัวเป็นๆนี่แหละ

6. รับประกันหลังการขาย เนื่องจากปัจจุบันกล้อง DSLR มีการขายที่เรียกกันว่าประกันร้าน ประกันศูนย์ กล้องที่เรียกว่าประกันร้านนั่นก็คือกล้องที่ไม่มีการรับประกันจากบริษัทที่นำเข้าและจัดจำหน่ายอย่างเป็นทางการ บางครั้งก็เรียกกันว่ากล้องหิ้วเพราะเปิดกล่องออกมาต้องผงะกับใบรับประกันภาษาฮิบรู แถมคู่มือการใช้งานยังเป็นภาษาฮิบรูด้วยอีกต่างหาก ยังไม่พอครับถ้าแจ็กพ็อตอาจได้กล้องที่มีแต่ภาษาอังกฤษกับภาษาฮิบรู แสดงว่าต้องหิ้วมาจากที่ไหนสักแห่งในโลกแน่ๆมันจึงพูดไทยไม่เป็น ส่วนของประกันศูนย์นั้นจะต้องมีใบรับประกันที่ออกโดยตัวแทนจำหน่ายในประเทศไทย ส่วนใหญ่มีคู่มือภาษาไทย และกล้องเองมีเมนูภาษาไทยด้วย (แต่โดยส่วนใหญ่แล้วไม่ค่อยน่าซีเรียสสำหรับกล้องรุ่นใหม่ๆเพราะมีให้เลือกแทบทุกภาษาไม่ว่าจะกล้องประกันร้านหรือประกันศูนย์) สิ่งที่แตกต่างกันก็คือ กล้องประกันร้านราคาถูกกว่า แต่เอาเข้าศูนย์บริการในเมืองไทยแล้วถือว่าไม่อยู่ในประกัน คุณต้องเอากล้องตัวนั้นไปเคลมกับร้านที่ซื้อมาเท่านั้น (ซึ่งก็ไม่รู้ว่าจะมีบริการหลังการขายดีแค่ไหน) อยู่ที่การตัดสินใจของคุณว่าจะประหยัดเงินแล้วเสี่ยงดวง หรือ ยอมจ่ายเพิ่มเพื่อความอุ่นใจ แต่สำหรับมือใหม่ขอแนะนำซื้อประกันศูนย์สบายใจกว่าครับ